Roberts straight-line mechanism

In the late seventeenth century, before the development of the milling machine, it was extremely difficult to machine straight, flat surfaces. For this reason, good prismatic pairs without backlash were not easy to make. During that era, much thought was given to the problem of attaining a straight-line motion as a part of the coupler curve of a linkage having only revolute connection. Probably the best-known result of this search is the straight line mechanism development by Watt for guiding the piston of early steam engines. Although it does not generate an exact straight line, a good approximation is achieved over a considerable distance of travel.
In this post, we show approximated straight-line mechanism discovered by Richard Roberts (1789-1864). He discovered the Roberts' Straight-line mechanism.
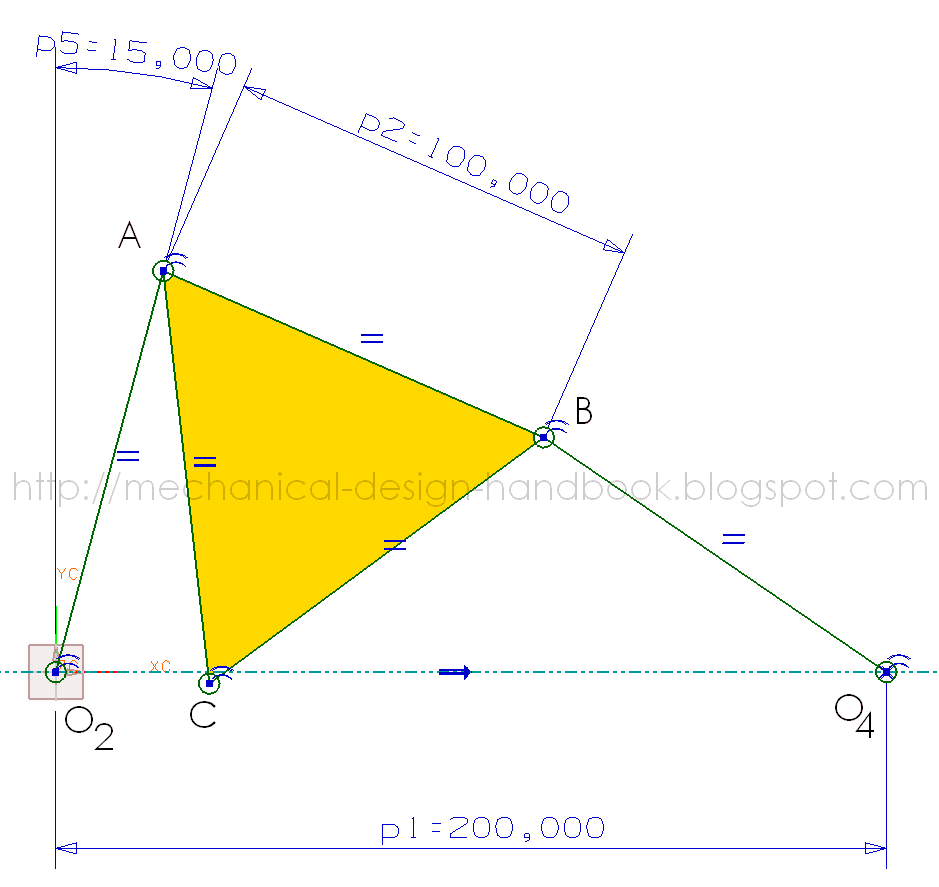
O2A = 100
O4B = 100
AB = 100
AC = 100
BC = 100
O2O4 = 200
We can find from the following video clip that point C moves as an approximated straight line. Though it is not an exact straight-line motion, but it's good as a starting point. In later post, we will explore more straight-line mechanisms that can give better straight-line approximation.
Another quick way to create and test Roberts straight-line mechanism is to use design wizard in SAM 7.0 The Ultimate Mechanism Designer. Length of each link can be changed easily and it can display the path of desired node. Watch the following video...
Source:


Comments